Você vai precisar de:
- 01 Placa Arduino
- 01 Módulo Bluetooth HC05 ou HC06
- 01 Fonte de energia (bateria)
- 02 Motor DC
- 02 Ponte H (uma para cada motor)
- 03 Resistor 1kR ou 10kR
- Estrutura do robô
- Ferramentas e fios
Vou pular a parte de construção da estrutura, e focar na parte eletrônica, e de programação.
Código do robô
Cada versão possui características diferentes, então escolha de acordo com o que você precisa, e grave o código em sua placa Arduino.
Versão 1
- 2 Pontes H
- Sem armas
- Sem SoftwareSerial (rx/rx nos pinos 0 e 1)
- PWM usado para suavizar as curvas
Versão 2
- 3 Pontes H
- Arma usando ponte H
- Sem SoftwareSerial
- PWM usado para suavizar as curvas
Versão 3
- 2 Pontes H
- Sem armas
- SoftwareSerial (rx/tx nos pinos 7 e 8)
- PWM usado para suavizar as curvas
Versão 4
- 3 Pontes H
- Arma usando ponte H
- SoftwareSerial (rx/tx nos pinos 7 e 8)
- PWM usado para suavizar as curvas
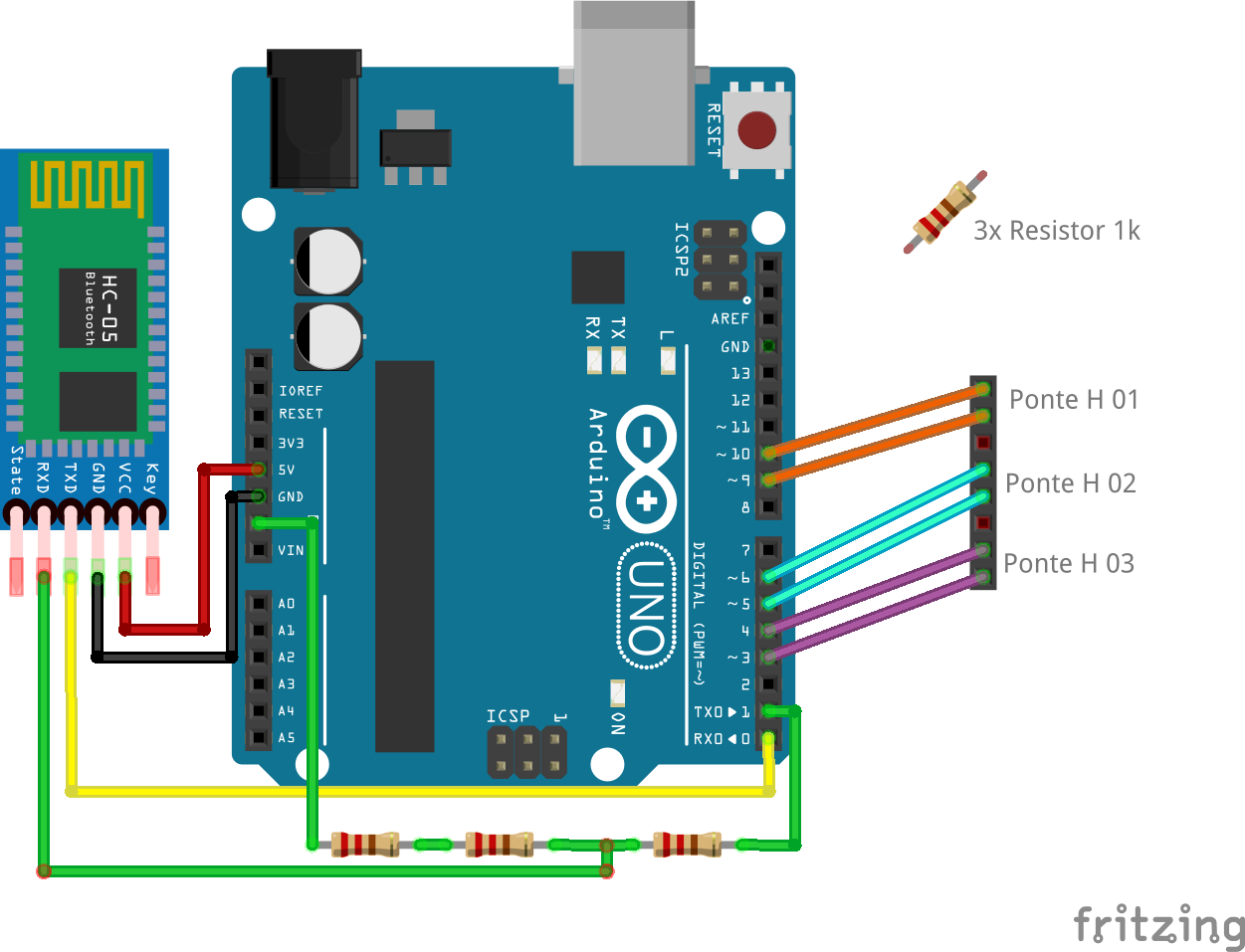
Circuito
Com sua placa gravada, monte-a de acordo com o esquema abaixo.
Para versões 1 e 2, utilize este circuito:
Para versões 3 e 4, utilize este:
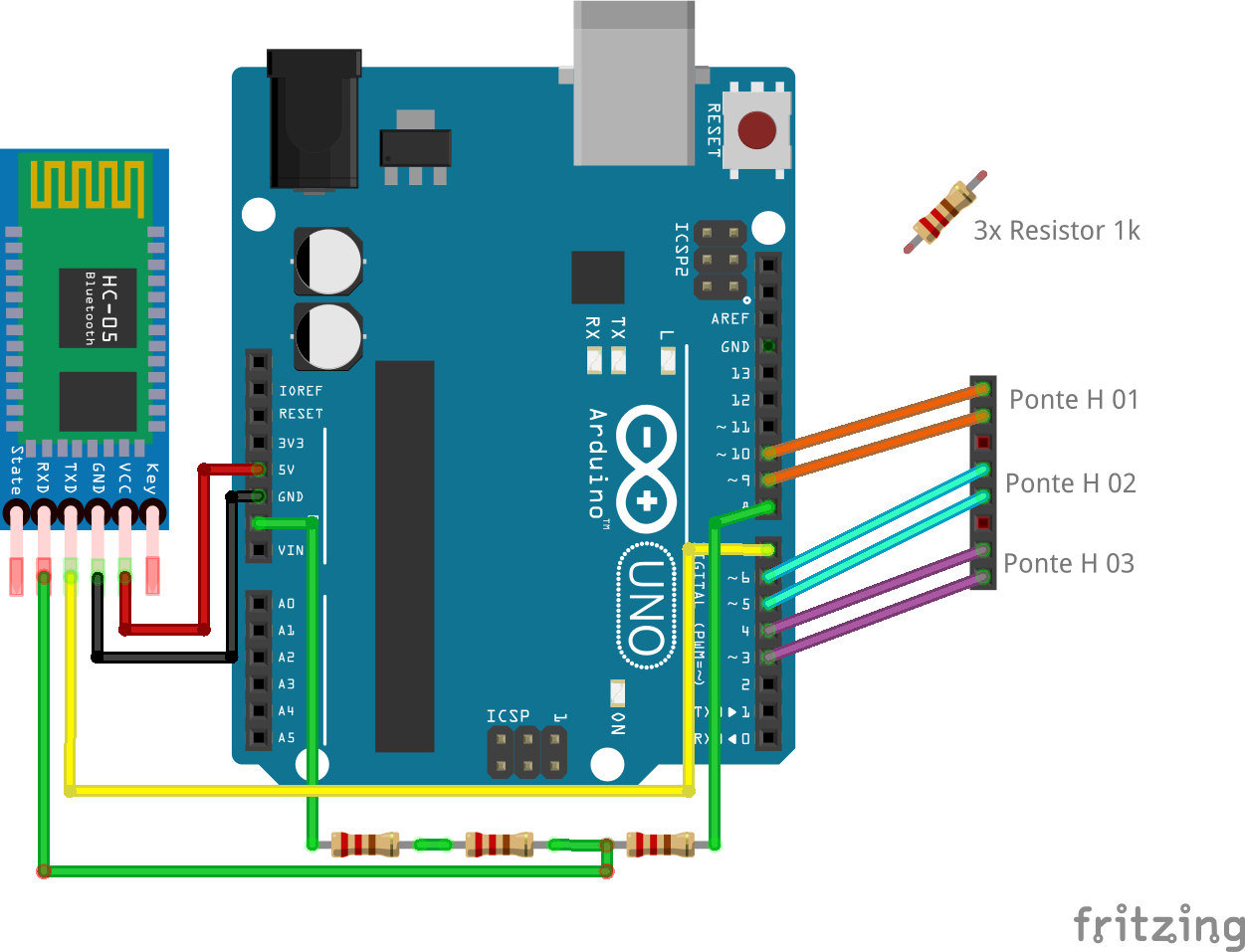
Atenção! Utilize 3 resistores de 1kR ou de 10kR, para criar um divisor de tensão no RX do módulo bluetooth, ele precisa receber sinal em 3v3, caso contrário irá queimar.
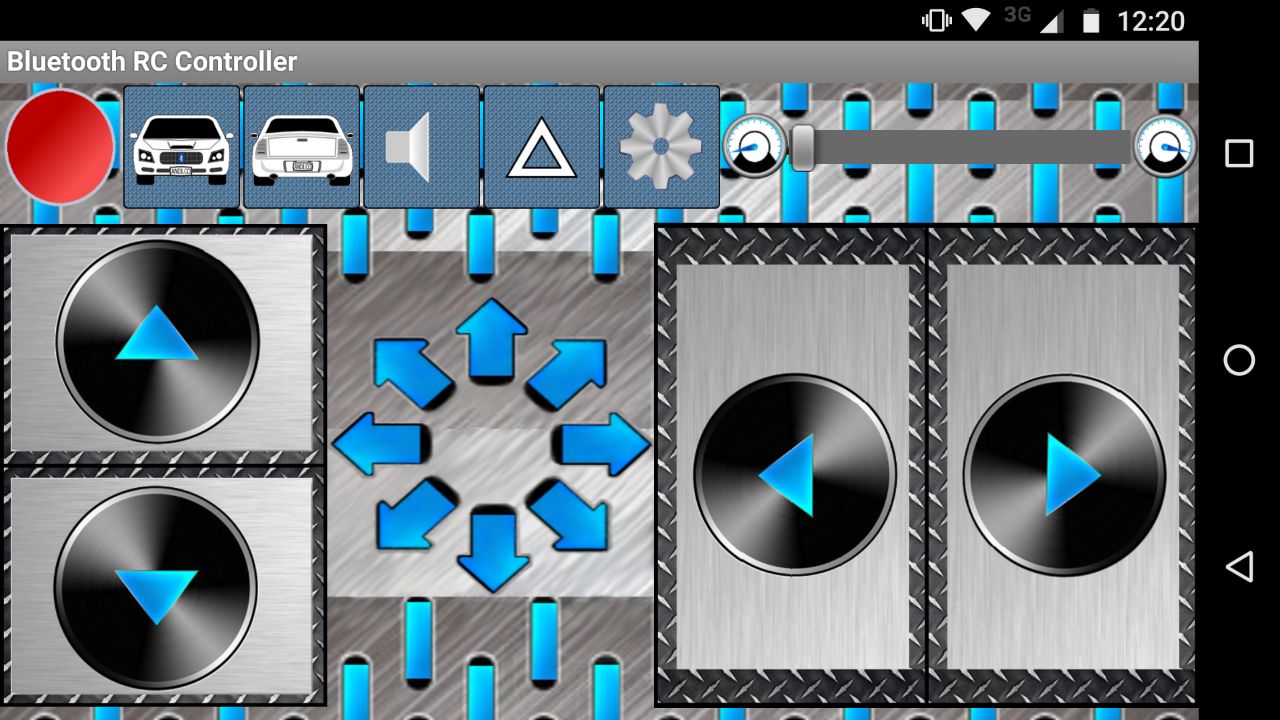
Aplicativo Android
Essa é sua interface:
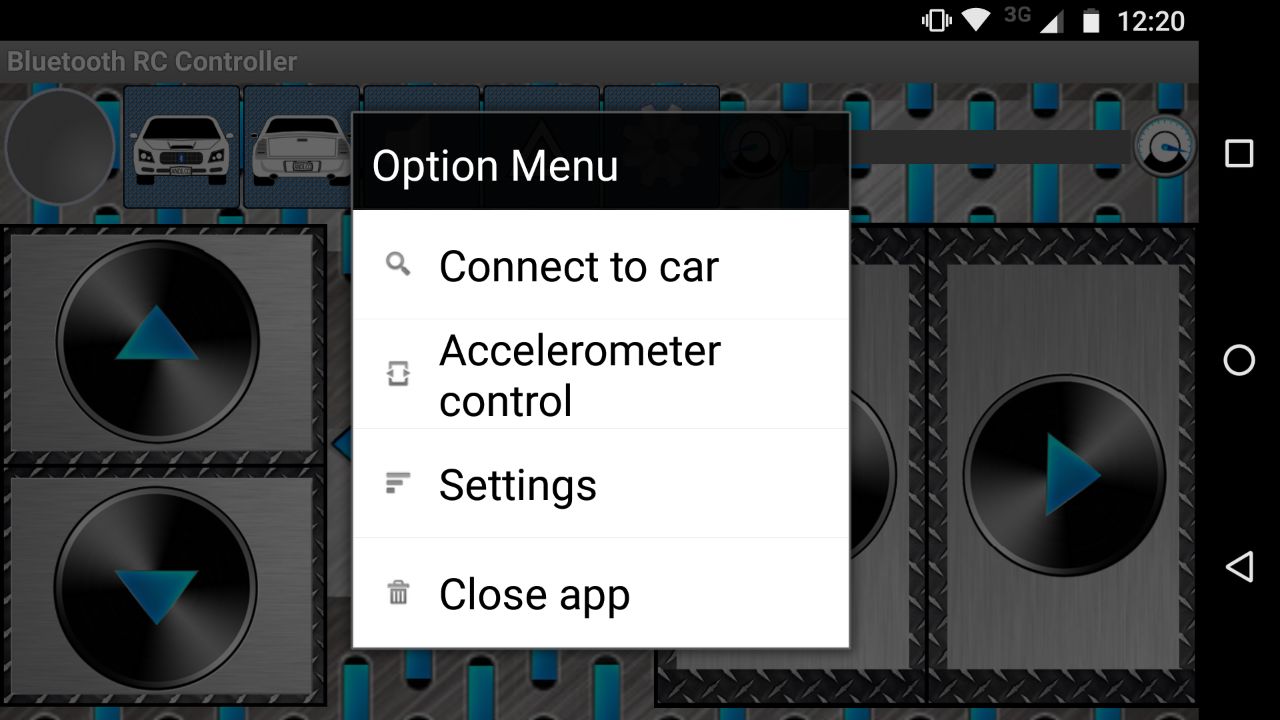
Ligue o Bluetooth no celular, clique na engrenagem, e na opção Connect to car.
Com o código gravado no Arduino, Smartphone pareado com o módulo Bluetooth, e circuito corretamente montado, tudo pronto!
Você pode controlar o robô para frente, para trás, e girar para a direita ou para a esquerda, porém não anda em diagonais.
Caso o robô esteja com o sentido contrário, inverta os fios da ponte H.
Se não funcionou perfeitamente até aqui, sugiro que desmonte o circuito e remonte, prestando atenção nas ligações elétricas, pois qualquer mal contato ou ligação errada, fará com que seu robô não funcione corretamente!
Para alterar a velocidade da rotação, mude nos códigos a variável PWM, com os valores de 0 a 255, que equivalem de 0% a 100%.
Atenção: Se você escolheu o código com ponte H extra como arma, os botões no aplicativo com a figura de um carro, ligam e desligam a arma para um sentido e para outro: o botão que representa a parte frontal do carro, liga uma luz azul e aciona a arma em um sentido. Já o botão que representa a traseira, acende uma luz vermelha, e inverte o sentido.
O robô possui proteção via software, impedindo curto-circuito nas pontes H, evitando que o robô pare de funcionar, ou queime. Ou seja: caso você acione dois botões com sentidos opostos, não haverá curto-circuito.
Também é interessante comentar: tente deixar o módulo e o Arduino o mais estável possível dentro da estrutura. Uma boa dica é colocá-los entre espumas, ou algo que amorteça, pois uma colisão forte pode reiniciar o Arduino, perdendo a conexão Bluetooth, e seu robô ficará parado por alguns segundos até reconectar.